









Produktkonsultation
Din e-mailadresse vil ikke blive offentliggjort. Påkrævede felter er markeret *



Vejledning til børstet jævnstrømsmotor: Sådan fungerer det, nøglespecifikationer og hvornår du skal bruge en
Jun 04,2026
DC-gearmotorer: Den komplette købervejledning til typer, specifikationer og udvalg
May 28,2026
Gear stepmotor forklaret: typer, moment og hvordan man vælger den rigtige
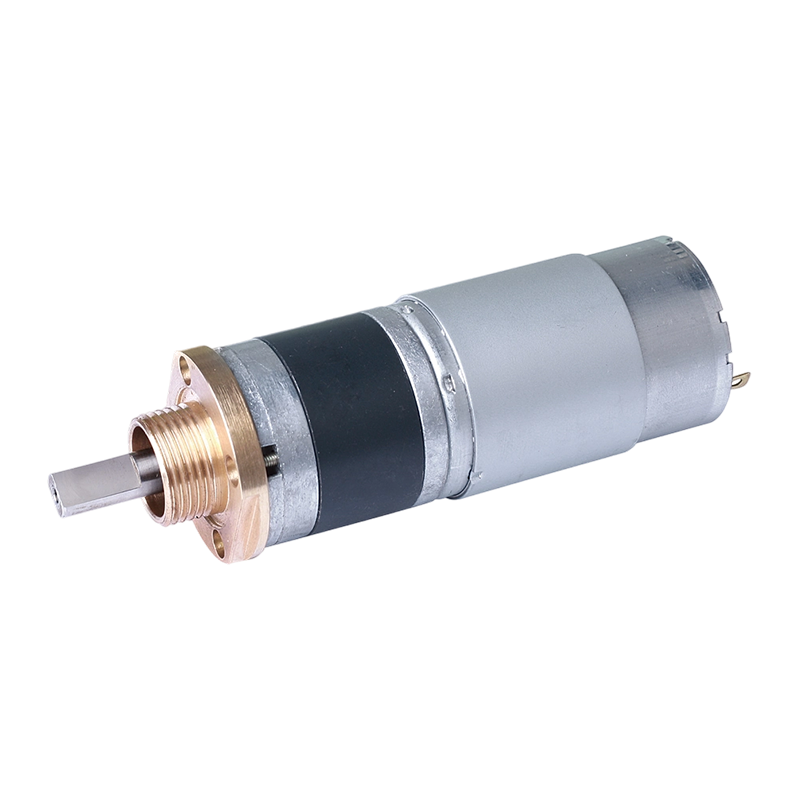
May 21,2026En DC gearmotor er en jævnstrøms elektrisk motor parret med en mekanisk gearkasse i en enkelt integreret enhed. Selve motoren roterer hurtigt - ofte 3.000 til 15.000 RPM ved nominel spænding - men de fleste applikationer i den virkelige verden har brug for langsom, kontrolleret bevægelse med betydelig drejekraft. Gearkassen løser dette ved at bytte hastighed for drejningsmoment gennem en række indgribende gear. Resultatet er en udgangsaksel, der drejer langt langsommere end motorens rotor, men med et forholdsmæssigt højere drejningsmoment tilgængeligt på akslen.
Uden gearkassen kan en lille jævnstrømsmotor let dreje en ventilatorvinge, men den kæmper med at løfte en last, drive et transportbånd eller dreje en ventil. Med en gearreduktion på f.eks. 100:1 leverer den samme motor, der producerer 5 mN·m fritløbende drejningsmoment, nu cirka 500 mN·m ved udgangen - minus tab fra gearindgrebsfriktion, typisk 5-20 % afhængigt af geartype og smøring. Denne multiplikation af drejningsmoment, kombineret med den kompakte integration af motor og gearkasse i én enhed, er grunden til, at DC-gearmotorer er blandt de mest specificerede bevægelseskomponenter i industrielle, kommercielle og forbrugerapplikationer.
Gearkassedesignet har en større indflydelse på ydeevne, størrelse, effektivitet og støj end næsten enhver anden designvariabel. Fire konfigurationer dominerer markedet.
Stigende tandhjul har lige tænder skåret parallelt med akslens akse. De er den enkleste og billigste geartype at fremstille, hvilket gør cylindriske DC-motorer til standardvalget til omkostningsfølsomme applikationer. Deres største svaghed er støj: Fordi den fulde tandbredde griber ind samtidigt ved hver maskekontakt, producerer cylindriske tandhjul en karakteristisk klapren ved høj hastighed. Effektiviteten er god - typisk 95-98% pr. trin - og de håndterer moderate radiale belastninger godt. Tandhjulsmotorer er almindelige i printere, legetøj, salgsautomater og lette aktuatorer, hvor stille drift ikke er en prioritet.
En planetgearkasse arrangerer flere "planet" gear omkring et centralt "sol" gear, alle indeholdt i et ringgear. Fordi belastningen er delt på tværs af flere planetgear samtidigt, leverer en planetarisk DC-gearmotor meget høj momenttæthed i en kompakt, koaksial pakke. Udgangsakslen er på linje med motorakslen, hvilket forenkler installationen i layouter med begrænset plads. Planetgearkasser er stivere og mere præcise end spor- eller snekketyper, hvilket gør dem til det foretrukne valg til robotter, automatiske styrede køretøjer (AGV'er), elektriske skruetrækkere og enhver applikation, der kræver højt drejningsmoment, stram positionsnøjagtighed og lang levetid. Afvejningen er omkostningerne: planetgearkasser er væsentligt dyrere at producere end spor- eller spiralformede typer med samme drejningsmoment.
En snekkegearkasse bruger en skruelignende snekkeaksel, der går i indgreb med et snekkehjul i en 90 graders vinkel. Denne konfiguration opnår meget høje reduktionsforhold i et enkelt trin - sædvanligvis 5:1 til 100:1 - og giver en naturlig selvlåsende karakteristik: når motoren stopper, kan belastningen ikke drive gearkassen tilbage. Dette gør DC-motorer med snekkegear ideelle til applikationer, hvor lasten skal holde position uden strøm, såsom garageportåbnere, scenelifte, hospitalssengeaktuatorer og sikkerhedsbarrierer. Den væsentligste begrænsning er effektiviteten: Snekkegearnets friktion er høj, med typisk ettrinseffektivitet, der spænder fra 50-90 % afhængigt af ledningsvinklen, hvor højere forhold er gradvist mindre effektive. Snekkegearmotorer producerer også betydelig varme under kontinuerlige højbelastningscyklusser.
Spiralformede tandhjul har tænder skåret i en vinkel i forhold til akslens akse, så kontakten mellem tænderne er gradvis og progressiv snarere end brat. Dette reducerer støj og vibrationer dramatisk sammenlignet med cylindriske tandhjul og forbedrer belastningskapaciteten en smule på grund af det større effektive kontaktareal. Spiralformede DC-gearmotorer er almindelige i applikationer, der kræver mere støjsvag drift - transportbåndsdrev, pakkemaskineri og medicinsk udstyr. Kombinationer af spiralskråkanter gør det muligt at forskyde udgangsakslen 90 grader i forhold til motoren, svarende til et snekkedrev, men med højere effektivitet (typisk 94–97 % pr. trin). Det øgede aksiale tryk, der genereres af spiralformet gearnet, kræver lejer, der kan håndtere denne belastning, hvilket øger enhedsomkostningerne en smule.
Selve DC-motorelementet kommer i to grundlæggende arkitekturer, og valget mellem dem påvirker omkostninger, vedligeholdelseskrav, hastighedsområde og levetid betydeligt.
| Feature | Børstet DC gearmotor | Børsteløs DC gearmotor (BLDC) |
| Kommuteringsmetode | Mekanisk (kulbørster kommutator) | Elektronisk (ESC eller motordriver) |
| Typisk levetid | 500-3.000 timer (begrænset børsteslid) | 10.000–20.000 timer |
| Kontrol kompleksitet | Enkel — spænding eller PWM direkte | Kræver dedikeret BLDC-driver/ESC |
| Effektivitet | 75-85 % typisk | 85-95 % typisk |
| Støj & EMI | Højere (børstebuedannelse genererer EMI) | Lavere |
| Enhedsomkostninger | Lavere | Højere (motorfører) |
| Typiske applikationer | Legetøj, hvidevarer, lysautomatisering | Robotter, AGV'er, medicinsk udstyr, EV'er |
Til prototyper eller periodiske applikationer med lav belastning er en børstet DC-gearmotor drevet af en simpel L298N eller TB6612FNG H-bro den hurtigste og billigste vej til et fungerende system. For alt, der kører uafbrudt, opererer i et barskt miljø eller skal holde årevis i marken uden vedligeholdelse, leverer en børsteløs DC-gearmotor - på trods af dens højere forudgående omkostninger og ekstra driverelektronik - næsten altid bedre samlede ejeromkostninger.
DC-gearmotordatablade kan være tætte, men fem parametre bestemmer, om en motor vil fungere i din applikation. At forstå hver enkelt forhindrer de mest almindelige udvælgelsesfejl.
DC gearmotorer er designet til en specifik forsyningsspænding - oftest 6V, 12V, 24V eller 48V i industri- og hobbyapplikationer. Betjening af en motor væsentligt over dens nominelle spænding accelererer børsteslid i børstede typer, overophedes viklinger og forkorter lejernes levetid. Drift under nominel spænding reducerer tilgængeligt drejningsmoment og kan få motoren til at stoppe under belastning. For batteridrevne systemer skal du matche motorens nominelle spænding med den nominelle batterispænding ved midtopladning, ikke ved fuld opladning, for at undgå overspænding i toppen af opladningscyklussen. En 12V DC gearmotor, der kører fra en frisk opladet 3S LiPo (12,6V) er marginalt acceptabel; at køre det fra en 4S-pakke (16,8V) vil ødelægge det hurtigt.
Den ubelastede hastighed er udgangsakslens RPM, når motoren kører med nominel spænding med nul påført drejningsmoment. Under faktisk belastning falder hastigheden - typisk med 10-20 % ved nominelt (kontinuerligt) drejningsmoment og med op til 50 % ved maksimalt stall-drejningsmoment. Når du beregner, om en DC-gearmotor kan flytte en belastning ved den påkrævede hastighed, skal du altid bruge den belastede hastighed ved dit forventede drejningsmoment, ikke tallet uden belastning. Producenter angiver nogle gange kun ubelastet hastighed og stall-drejningsmoment; det belastede arbejdspunkt falder nogenlunde i midten af hastighed-drejningsmoment-kurven.
Nominelt drejningsmoment (også kaldet kontinuerligt drejningsmoment) er det maksimale drejningsmoment, som motoren kan levere på ubestemt tid uden overophedning. Stallmoment er det maksimale drejningsmoment, der produceres, når akslen holdes stationær - typisk 5-10 gange det nominelle drejningsmoment for en børstet DC-gearmotor. Blokeringsmoment er nyttigt til dimensionering af intermitterende spidsbelastninger (den kraft, der er nødvendig for at bryde en fastlåst ventil fri, for eksempel), men kontinuerlig drift ved eller tæt på stall vil overophede motoren hurtigt. Vælg en motor, hvis nominelle drejningsmoment er mindst 20–30 % over din applikations forventede kontinuerlige belastningsmoment. Denne sikkerhedsmargen tager højde for friktionsvariationer, spændingsfald og temperaturnedsættelse.
Gearforholdet udtrykker, hvor mange motorakselomdrejninger der producerer en udgangsakselomdrejning. Et forhold på 50:1 betyder, at outputtet drejer én gang for hver 50 motoromdrejninger. Højere gearforhold giver lavere udgangshastighed og højere udgangsmoment. Men meget høje udvekslingsforhold introducerer flere geartrin, hvilket øger friktionstab og slør - det lille frie spil i udgangsakslen, når retningen skifter. Til positioneringsapplikationer er sløret en kritisk specifikation: Planetgearkasser tilbyder typisk 0,5-3 bueminutters slør i præcisionsgrader, mens økonomiske spidsgearkasser kan have 1-5 graders slør, hvilket er uacceptabelt for noget, der kræver gentagelig positionering.
Driftscyklus beskriver den procentdel af tid, en motor kører versus hviler inden for en given cyklusperiode. En motor, der er klassificeret til S1 (kontinuerlig drift) kan køre uendeligt ved nominel belastning uden overophedning. S2 (korttidsdrift) og S3 (intermitterende periodisk drift) klassificeringer tillader højere spidseffektniveauer, fordi motoren afkøles i de slukkede perioder. Tilpas altid motorens driftsværdi til din faktiske driftscyklus - en motor, der er normeret til 30 % driftscyklus, vil overophedes og svigte, hvis den kører kontinuerligt, selvom drejningsmomentet og hastigheden er inden for mærkepladens grænser.
Spændingsvalg er ofte drevet af den tilgængelige strømkilde snarere end af motorpræferencer, men at forstå de typiske anvendelsestilfælde for hvert spændingsniveau hjælper med at indsnævre dine muligheder hurtigt.
Ved at få motorvalg rigtigt første gang undgår du dyre redesigns og fejl i marken. Følg denne praktiske ramme:
Beregn det drejningsmoment, din applikation kræver ved udgangsakslen. For en robot med hjul betyder det, at man beregner den kraft, der er nødvendig for at accelerere robottens masse, overvinde rullefriktion og forcere eventuelle stigninger, der forventes under drift. For en lineær aktuator beregnes kraften på ledeskruen og konverteres til motormoment via skruens ledning og effektivitet. Tilføj en 25-50 % sikkerhedsmargin for at tage højde for friktionsvariationer, ældning og værst tænkelige belastningsscenarier. Dette måldrejningsmomenttal - med den anvendte margen - bliver din mindste nominelle drejningsmomentspecifikation.
Angiv den minimale og maksimale udgangsakselhastighed, som din applikation har brug for. En transportør, der flytter produkt med 0,5 m/s med en drivrulle med en diameter på 50 mm, kræver en udgangshastighed på ca. 191 RPM (0,5 / (π × 0,05) × 60). Vælg en motor, hvis tomgangshastighed er mindst 15–20 % over den påkrævede belastede hastighed for at sikre, at motoren ikke kører i nærheden af standsning under normale forhold.
Brug følgende beslutningsvejledning til at matche gearkassetypen til applikationskravene:
Kontroller, at din strømforsyning kan levere spidsstrømsbehovet for motoren ved stall. Standsningsstrømmen for en børstet DC-gearmotor er typisk 5-10 gange den ubelastede strøm. Hvis din forsyning ikke kan tilføre denne strøm forbigående under opstart eller blokering, skal du tilføje en strømbegrænsende motordriver med justerbar strømgrænse, eller vælg en motordriver med tilstrækkelig frihøjde. For børsteløse DC-gearmotorer skal du bekræfte, at BLDC-driverens kontinuerlige og maksimale strømværdier overstiger motorens krav med mindst 20 % margin.
Standard DC gearmotorer er ikke forseglet. Hvis motoren udsættes for støv, fugt, kølevæskestænk eller udvaskningsforhold, angiv en IP-klassificeret enhed — IP54 for støv- og stænkbeskyttelse, IP65 eller IP67 for mere krævende miljøer. Til fødevareforarbejdning, farmaceutiske eller marine applikationer skal du bekræfte, at gearkassesmøremidlet opfylder gældende lovkrav (NSF H1 fødevaregodkendt fedt til fødevarekontaktzoner, for eksempel). Driftstemperaturområdet er også vigtigt: Standardmotorer er klassificeret til 0–40°C omgivelsestemperatur; til kølehuse eller udendørs installationer i nordlige klimaer, bekræft lavtemperaturfedtspecifikationer og viklingstemperaturklassificeringer.
DC-gearmotorer optræder i et enormt udvalg af produkter og systemer. At forstå, hvor de er almindeligt anvendte, hjælper med at identificere passende referencedesign og validerede konfigurationer.
| Industri | Ansøgning | Typisk gearmotortype |
| Robotter og AGV'er | Drivhjul, ledaktivering, gribemekanismer | Børsteløs planetarisk, 24V–48V |
| Industriel automation | Transportører, indekseringsborde, ventilaktuatorer | Spiralformet, orm eller planetarisk, 24V |
| Medicinsk udstyr | Infusionspumper, kirurgiske værktøjer, hospitalssenge | Børsteløs planetarisk, lavt slør, 12V–24V |
| Automotive | Elruder, sædejusteringer, soltagsdrev | Børstet orm eller spore, 12V |
| Forbrugerelektronik | Kamera pan/tilt, smart home aktuatorer, printere | Børstet spor, 5V–12V |
| Landbrug | Vandingsventilstyring, såmekanismer | IP-klassificeret orm eller planetarisk, 12V–24V |
| Bygningsautomatisering | VVS-spjæld, persienneaktuatorer, dørdrev | Børsteløs spiralformet eller orm, 24V |
DC-gearmotorer er velegnede til drift med variabel hastighed, fordi DC-motorens hastighed er direkte proportional med påført spænding. I praksis styres hastigheden ved en af tre metoder.
PWM er standardmetoden til styring af børstede DC-gearmotorer fra mikrocontrollere, PLC'er og motordriver-IC'er. Føreren tænder og slukker for motorforsyningen ved en fast frekvens - typisk 1-20 kHz - og driftscyklussen (den procentdel af tid, forsyningen er tændt) bestemmer gennemsnitsspændingen og dermed hastigheden. En 50 % duty cycle ved 12V leverer ca. 6V svarende til motoren. PWM-styring er effektiv, fordi koblingstransistorerne bruger det meste af deres tid helt til eller fra, hvilket minimerer resistive tab. PWM-frekvenser under 1 kHz kan forårsage hørbar motorhvin, da armaturviklingerne vibrerer ved omskiftningsfrekvensen; frekvenser over 20 kHz skubber dette over det hørbare område. For børstede DC-gearmotorer er en PWM-frekvens på 10–20 kHz et almindeligt praktisk valg.
Til applikationer, der kræver præcis, ensartet hastighed uanset belastningsvariation - robotplatforme, bånddrev, præcisionsdispensering - giver en roterende encoder monteret på motorakslen eller gearkassens udgang hastighedsfeedback i realtid til en PID-controller. Regulatoren sammenligner den faktiske hastighed med sætpunktet og justerer PWM-driftscyklussen for at kompensere. Encodere til DC-gearmotorer er typisk kvadraturoptiske eller magnetiske halleffekttyper med opløsninger fra 6 til flere tusinde tællinger pr. omdrejning afhængigt af præcisionskrav. Mange leverandører af DC-gearmotorer tilbyder integrerede encodermuligheder som standard katalogartikler, hvilket forenkler hardwareintegrationen betydeligt.
I simple systemer, hvor belastningen er relativt konstant, og hastighedspræcisionen ikke er kritisk, kan hastigheden indstilles ved at justere forsyningsspændingen med en variabel jævnstrømsforsyning eller en lineær spændingsregulator. Denne tilgang er den mindst effektive - en lineær regulator spreder spændingsfaldet som varme - og tilbyder ingen belastningskompensation, men det er den enkleste implementering og er velegnet til testbænke, manuelle hastighedsjusteringer og meget laveffektapplikationer, hvor termisk spredning i regulatoren ikke er et problem.
At forstå, hvad der i sidste ende får en DC-gearmotor til at svigte, hjælper dig med at designe systemer, der forlænger serviceintervaller og fanger problemer, før de forårsager uplanlagt nedetid.
Din e-mailadresse vil ikke blive offentliggjort. Påkrævede felter er markeret *
Copyright © Zhejiang Dongzheng Motor Co.,Ltd. Alle rettigheder forbeholdes.
 DC-gearmotorproducenter
DC-gearmotorproducenter